Unsafe driving behaviors such as fatigue, aggressive acceleration, and distraction contribute to 94% of traffic accidents and significantly impact fuel efficiency and emissions. Current ITS and ADAS technologies are largely reactive, lacking predictive capabilities for real-time risk prevention. This study presents a machine learning-based approach to proactively assess driver behavior using Random Forest, XGBoost, and Neural Networks. Data is collected from telematics systems, GPS tracking, on-board diagnostics, and driver monitoring sensors across public transport fleets. The methodology involves feature engineering, model training, cross-validation, and real-world scenario testing. The proposed system aims to enhance road safety, reduce fuel consumption, and lower emissions by integrating predictive analytics into existing ITS and ADAS infrastructure. The research adheres to ethical standards, ensuring data privacy and fairness, and offers actionable insights for transport authorities, policymakers, and fleet managers seeking intelligent and sustainable mobility solutions.
Keywords: Driver Behavior, Machine Learning, ADAS, ITS, Telematics Data, Predictive Modeling, Road Safety, XGBoost, Neural Networks, Fuel Efficiency.
I. INTRODUCTION
The evolution of Intelligent Transportation Systems (ITS) and Advanced Driver Assistance Systems (ADAS) has significantly shaped modern transportation by improving monitoring and control mechanisms. However, persistent challenges in road safety, fuel efficiency, and environmental sustainability remain, particularly due to unsafe driver behaviors such as fatigue, distraction, and speeding. These behaviors are responsible for an estimated 94% of road accidents, leading to about 1.3 million deaths annually (WHO, 2021; NHTSA, 2020). Furthermore, aggressive driving can increase fuel consumption and emissions by up to 40% and 30%, respectively (IEA, 2021).
While existing ADAS and ITS technologies offer real-time alerts, they are largely reactive, triggering interventions after risky behavior has already occurred. This study proposes a proactive solution using machine learning (ML) to predict unsafe driving behaviors before they manifest. By leveraging algorithms such as Random Forest (RF), Extreme Gradient Boosting (XGBoost), and Neural Networks, the system can detect patterns of risk in real time.
The aim of this study is to provide a predictive analytics model integrated with telematics and sensor data, enhancing road safety, operational efficiency, and reducing environmental impact. This is particularly valuable for public transport fleets, where vehicles operate under diverse and challenging urban conditions. The model supports informed decision-making for fleet operators, regulators, and policymakers while maintaining ethical data usage and fairness.
The study focuses on evaluating a predictive ML model that can anticipate risky driving behavior and integrate it into real-time ITS and ADAS applications. The core objectives are:
- Analyze driver behavior patterns using real-time vehicle telematics data.
- Evaluate and compare ML techniques (Random Forest, XGBoost, Neural Networks) for behavior prediction.
- Optimize model accuracy through feature selection, hyperparameter tuning, and ensemble learning.
- Validate ML models using real-world driving scenarios.
This study focuses on public transport fleet drivers operating in urban environments. Data sources will include telematics data, GPS tracking, vehicle sensors, and driver biometrics. The study will specifically target:
- Prediction of unsafe driving events (e.g., harsh braking, speeding, distracted driving).
- Impact of driving behavior on fuel efficiency and emissions.
- Integration of ML-based insights into existing ADAS technologies.
The research addresses primary questions:
- Which algorithm performs best accuracy in predicting unsafe driving within ITS/ADAS settings?
- How can predictive models be integrated into real-time ITS and ADAS applications?
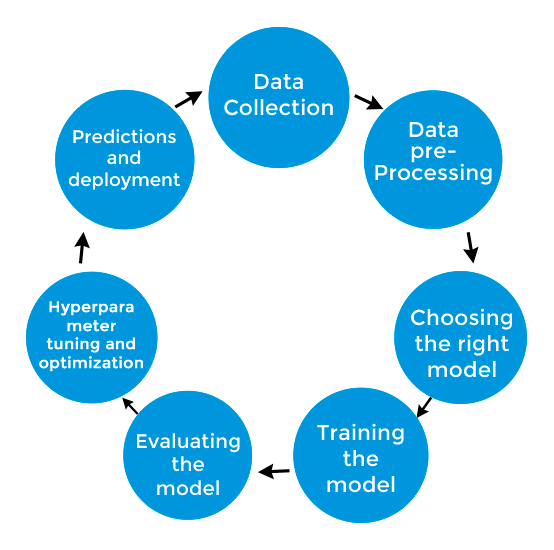
II. PROPOSED RESEARCH APPROACH AND METHODOLOGY
The study adopts a multi-phase methodology to ensure a robust evaluation of driver behavior using machine learning. The process begins with comprehensive data collection from telematics, OBD, and driver monitoring systems, targeting public transport drivers in urban UAE settings. Data are preprocessed through feature engineering to extract relevant indicators of unsafe driving behavior. Multiple ML models—Random Forest, XGBoost, CNN-LSTM, and GNN—are trained and validated. Model performance will be assessed using metrics such as accuracy, F1-score, and ROC-AUC through k-fold cross-validation and real-world driving scenario tests to ensure generalizability and fairness.
Table 1: Research Approach and Methodology Flow
| Section | Description |
|---|
| Research Ethics | Ensures compliance with GDPR and data privacy laws, anonymization of driver data, and mitigation of bias in ML models for fairness. |
| The Methodology | Multi-phase approach integrating data collection, feature engineering, ML model development, and real-world validation. |
| Data Sources & Collection | Sources: On-board diagnostics (OBD) data, GPS tracking systems, CAN bus signals, and camera-based driver monitoring systems. Collection: IoT sensors, vehicle diagnostics, and real-world driving datasets. |
| Analytical Approach | Feature Engineering: Identifies key behavioral indicators (speed, braking, fatigue, lane changes). ML Models: Random Forest, XGBoost, CNN-LSTM, Graph Neural Networks (GNNs). Evaluation: Accuracy, F1-score, ROC-AUC, real-world validation. |
| Required Technology | Software: Python (Scikit-learn, TensorFlow, PyTorch), MATLAB. Hardware: Cloud-based computing, edge AI for real-time processing. |
III. LITERATURE REVIEW
Prior studies have demonstrated the potential of machine learning (ML) to predict and understand driver behavior. Khan et al. (2021) utilized artificial neural networks (ANNs) on a dataset of 94,000 instances with 54 features, achieving a high correlation (0.9962) between predicted and actual driver actions. However, they noted instability in early training, which limits real-time adaptability. Niu et al. (2021) applied traditional classifiers such as GBDT, AdaBoost, and Random Trees to detect unsafe truck driver behaviors. Model accuracy ranged from 0.64 to 0.95, and F1 scores varied from 0.52 to 0.72, highlighting challenges in predicting rare, context-specific behaviors. Their study also underscored the value of using correlation and odds ratios to interpret risk.
Abdelrahman et al. (2020) developed a Random Forest-based risk profiling model using the SHRP2 dataset, achieving 90% accuracy and an F1-score of 0.945. Their framework supported continuous learning via cloud-based updates. In vision-based systems, Qu et al. (2024) used a hybrid CNN-BiLSTM model to detect distracted driving, achieving 91.7% accuracy but struggling with full-body posture recognition. This reveals the need for multimodal systems integrating visual and sensor data.
Table 2: Summary of the Literature Review
| Author/Year | Purpose/Objectives | Methodology, Findings, Discussion |
|---|
| Khan et al. (2021) | Develop an ANN-based driver behavior model to predict intelligent driving patterns. | Dynamic Nonlinear Autoregressive ANN validated via time-series backpropagation, MLP, random subspace, linear regression, decision tree. Dataset: 94,380 instances, 54 attributes. MLP best: r=0.9962; MAE=30.39; RMSE=69.44. Early-phase fluctuations limit real-time adaptation. |
| Niu et al. (2021) | Investigate unsafe truck driver behavior using classification models. | Compared GBDT, AdaBoost, RT, CART on survey-based indicators. Accuracy 0.64–0.95; F1 0.52–0.72. Recommends hybrid, context-aware approaches. |
| Elassad et al. (2020) | Review ML applications in Driving Behavior; propose Driver–Vehicle–Environment framework. | SLR of 82 studies (2009–2019). ML outperforms traditional methods; challenges in standard evaluation and generalizability. |
| Abdelrahman et al. (2020) | Risk assessment for fleet management & insurance telematics. | SHRP2 dataset; Random Forest (90% accuracy, F1 0.945) outperforms DNN and ELM; supports cloud-based continuous learning. |
| Ontañón et al. (2020) | Improve long-term driving behavior prediction. | Baseline, Linear Regression, M5P, MLP. Linear regression lowest MSE (steering 0.03; throttle 6.79; braking 1.26). Long-horizon errors compound; suggests indirect prediction. |
| Qu et al. (2024) | Distracted driver monitoring with computer vision. | CNN-BiLSTM on AUC dataset; 91.7% accuracy, 93.1% F1. CNNs struggle with full-body posture; recommend better feature engineering. |
| Azadani & Boukerche (2021) | ITS-oriented driving behavior analysis. | Sensor-driven, multimodal assessment combining in-vehicle networks and communications; complements vision-only approaches. |
| Chandra et al. (2021) | Graph-theoretic ML for driver behavior in AV navigation. | StylePredict (GCN & MLP) adapts behavior to traffic style; fewer lane changes in aggressive traffic reduce risk; enables socially aware navigation. |
IV. RESEARCH GAPS
Despite progress in ML for driver behavior analysis, key gaps remain. Current models lack generalizability across varied environments and suffer from bias, reducing predictive accuracy. Hybrid approaches using ML, computer vision, and sensor fusion show potential but struggle with real-time adaptability. The absence of standardized evaluation frameworks limits cross-study comparisons, and data privacy concerns restrict large-scale deployment.
ML models can predict risky behavior and improve ADAS, but often ignore long-term reliability and fluctuating driving conditions. CNNs excel in classification but lack full-body posture detection for distraction analysis. Sensor-based methods require integration with real-time risk assessment. Future research should focus on hybrid ML models integrating heterogeneous data sources (including biometrics and environmental variables) and expand to public transport systems and sustainability impacts.
V. CONCLUSION
This study proposes predictive driver behavior modeling using machine learning to enhance safety, efficiency, and environmental sustainability through integration with ITS and ADAS. Contributions include:
- A robust ML-driven predictive model that supports real-time risk mitigation.
- Comparative evaluation across RF, XGBoost, Neural Networks, and GNNs.
- A rich dataset and feature set tailored to urban public transport fleets.
- An ethical and practical implementation strategy ensuring adaptability and acceptance.
The solution benefits fleet operators (efficiency and safety), policymakers (data-driven interventions), and insurance providers (better risk profiling). It also supports sustainability by reducing fuel usage and emissions through improved driving practices. The findings provide a foundation for future pilot implementations in UAE public transportation, including integration into live ITS dashboards for real-time interventions and planning.
REFERENCES
[1] Imani, M., Beikmohammadi, A., & Arabnia, H. R. (2025). Comprehensive Analysis of Random Forest and XGBoost Performance with SMOTE, ADASYN, and GNUS Upsampling Under Varying Imbalance Levels.
[2] Abdelrahman, A. E., Hassanein, H. S., & Abu-Ali, N. (2020). Robust data-driven framework for driver behavior profiling using supervised machine learning. IEEE Transactions on Intelligent Transportation Systems, 23(4), 3336–3350.
[3] Adavikottu, A., & Velaga, N. R. (2021). Analysis of factors influencing aggressive driver behavior and crash involvement. Traffic Injury Prevention, 22(sup1), S21–S26.
[4] Azadani, M. N., & Boukerche, A. (2021). Driving behavior analysis guidelines for intelligent transportation systems. IEEE Transactions on Intelligent Transportation Systems, 23(7), 6027–6045.
[5] Bouhsissin, S., Sael, N., & Benabbou, F. (2023). Driver behavior classification: a systematic literature review. IEEE Access, 11, 14128–14153.
[6] Chandra, R., Bera, A., & Manocha, D. (2021). Using graph-theoretic machine learning to predict human driver behavior. IEEE Transactions on Intelligent Transportation Systems, 23(3), 2572–2585.
[7] Elassad, Z. E., Mousannif, H., Al Moatassime, H., & Karkouch, A. (2020). The application of machine learning techniques for driving behavior analysis: A conceptual framework and a systematic literature review. Engineering Applications of Artificial Intelligence, 87, 103312.
[8] EPA. (2024). Carbon Pollution from Transportation.
[9] Garikapati, D., & Shetiya, S. S. (2024). Autonomous vehicles: Evolution of artificial intelligence and the current industry landscape. Big Data and Cognitive Computing, 8(4), 42.
[10] Hagl, M., & Kouabenan, D. R. (2020). Safe on the road – does Advanced Driver-Assistance Systems use affect road risk perception? Transportation Research Part F, 73, 488–498.
[11] Iyer, L. S. (2021). AI-enabled applications towards intelligent transportation. Transportation Engineering, 5, 100083.
[12] IEA. (2021). The role of digitalization in reducing transport emissions.
[13] Khan, Q. T. A., Abbas, S., Khan, M. A., Fatima, A., Alanazi, S., & Elmitwally, N. S. (2021). Modelling Intelligent Driving Behaviour Using Machine Learning. Computers, Materials & Continua, 68(3).
[14] Markets and Markets. (2022). Artificial intelligence in transportation market forecast 2020–2030.
[15] Moujahid, A., Tantaoui, M. E., Hina, M. D., Soukane, A., Ortalda, A., ElKhadimi, A., & Ramdane-Cherif, A. (2018). Machine learning techniques in ADAS: A review. In ICACCE 2018, 235–242.
[16] NHTSA. (2020). The impact of human factors on traffic accidents. Traffic Safety Research Journal, 57(2), 83–96.
[17] Niu, Y., Li, Z., & Fan, Y. (2021). Analysis of truck drivers’ unsafe driving behaviors using four machine learning methods. International Journal of Industrial Ergonomics, 86, 103192.
[18] Oladimeji, D., Gupta, K., Kose, N. A., Gundogan, K., Ge, L., & Liang, F. (2023). Smart transportation: an overview of technologies and applications. Sensors, 23(8), 3880.
[19] Ontañón, S., Lee, Y. C., Snodgrass, S., Winston, F. K., & Gonzalez, A. J. (2017). Learning to predict driver behavior from observation. In AAAI Spring Symposium, 506–512.
[20] Qu, F., Dang, N., Furht, B., & Nojoumian, M. (2024). Comprehensive study of driver behavior monitoring systems using computer vision and machine learning techniques. Journal of Big Data, 11(1), 32.
[21] Roussou, S., Garefalakis, T., Michelaraki, E., Brijs, T., & Yannis, G. (2024). Machine Learning Insights on Driving Behaviour Dynamics among Germany, Belgium, and UK Drivers. Sustainability, 16(2), 518.
[22] Taherdoost, H. (2022). Different types of data analysis; data analysis methods and techniques in research projects. International Journal of Academic Research in Management, 9(1), 1–9.
[23] Tamascelli, N., Solini, R., Paltrinieri, N., & Cozzani, V. (2022). Learning from major accidents: A machine learning approach. Computers & Chemical Engineering, 162, 107786.
[24] Tan, H. (2021). Machine learning algorithm for classification. Journal of Physics: Conference Series, 1994(1), 012016.
[25] Wang, F. Y., Lin, Y., Ioannou, P. A., Vlacic, L., Liu, X., Eskandarian, A., ... & Olaverri-Monreal, C. (2023). Transportation 5.0: Safe, secure, and sustainable intelligent transportation systems. IEEE Transactions on Intelligent Transportation Systems.
[26] WHO. (2021). Global road safety status report.
[27] Zhang, Y., Wu, M., Tian, G. Y., Zhang, G., & Lu, J. (2021). Ethics and privacy of artificial intelligence: Understandings from bibliometrics. Knowledge-Based Systems, 222, 106994.